Hiking in the Wild Permalink
Published in arXiv, 2026
A scalable perceptive locomotion framework for humanoids. 
Recommended citation: Zhu S., Zhuang Z., Zhao M., & Zhao H. (2026). Hiking in the Wild. arXiv preprint arXiv:2601.07701.
You can also find my articles on my Google Scholar profile.
Published in arXiv, 2026
A scalable perceptive locomotion framework for humanoids.
Recommended citation: Zhu S., Zhuang Z., Zhao M., & Zhao H. (2026). Hiking in the Wild. arXiv preprint arXiv:2601.07701.
Published in arXiv, 2026
A single vision-based end-to-end whole-body-control parkour policy for humanoid robots. 
Recommended citation: Zhuang, Z., Zhu, S., Zhao, M., & Zhao, H. (2026). Deep Whole-body Parkour. arXiv preprint arXiv:2601.07701.
Published in , 2025
We present a unified general humanoid motion interface and a zero-shot sim-to-real reinforcement learning framework, so that humanoid robots can successfully perform extreme contact-agnostic motion in the real world. 
Recommended citation: Ziwen Zhuang and Hang Zhao. "Embrace Collisions: Humanoid Shadowing for Deployable Contact-Agnostics Motions." (2025).
Published in Conference on Robot Learning, 2024
A single vision-based end-to-end whole-body-control parkour policy for humanoid robots. 
Recommended citation: Zhuang, Z., Yao, S., & Zhao, H. (2024). Humanoid Parkour Learning. 8th Annual Conference on Robot Learning.
Published in CoRL (Oral) Best system paper finalist, 2023
An end-to-end neural network for Quadruped robot with extreme agility skills 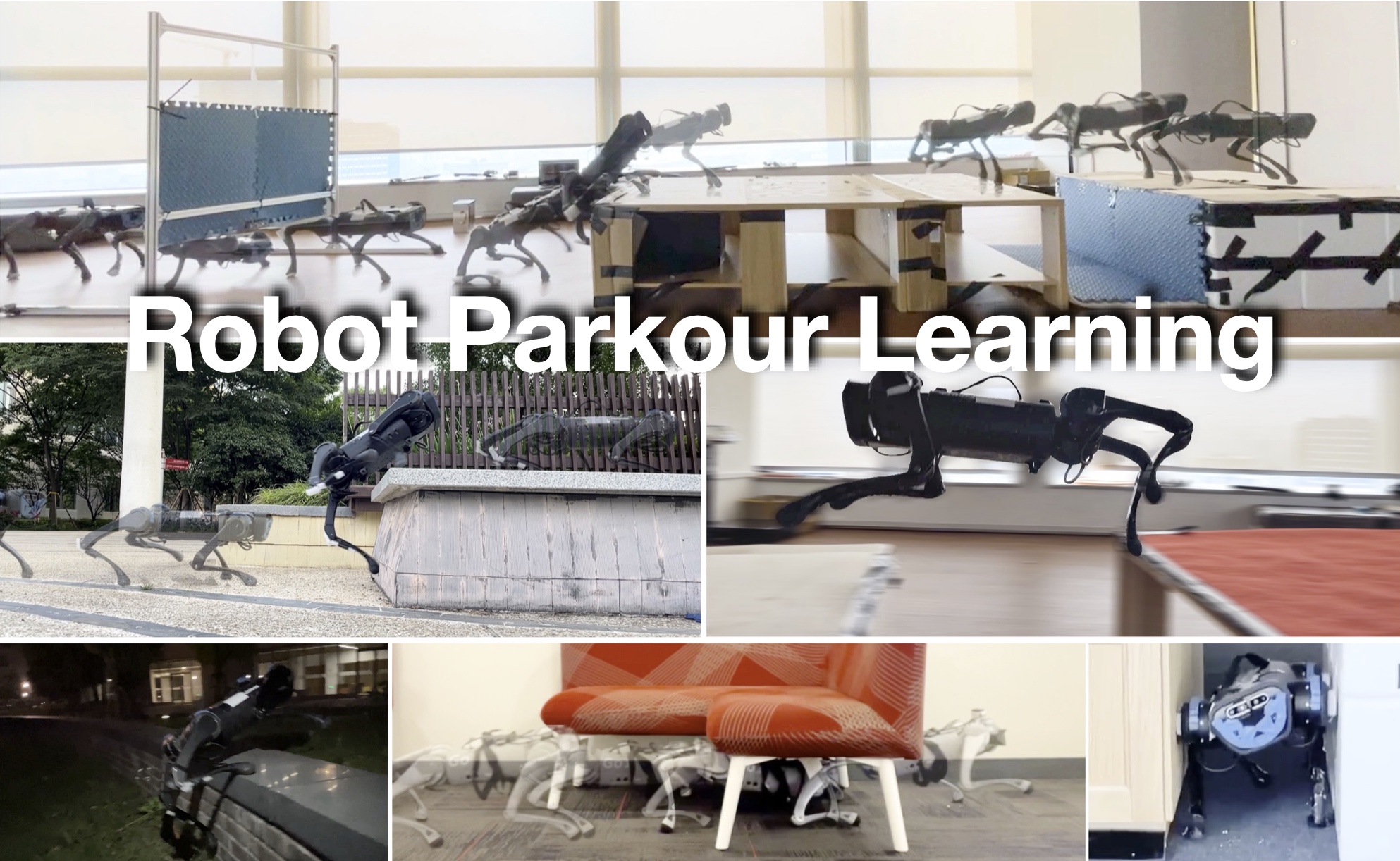
Recommended citation: Ziwen Zhuang*, Zipeng Fu*, Jianren Wang, Christopher G Atkeson, Soren Schwertfeger, Chelsea Finn, & Hang Zhao (2023). Robot Parkour Learning. In 7th Annual Conference on Robot Learning.
Published in ICRA, 2022
A self-supervised exploration algorithm that uses multimodal sensory input as a reward signal. 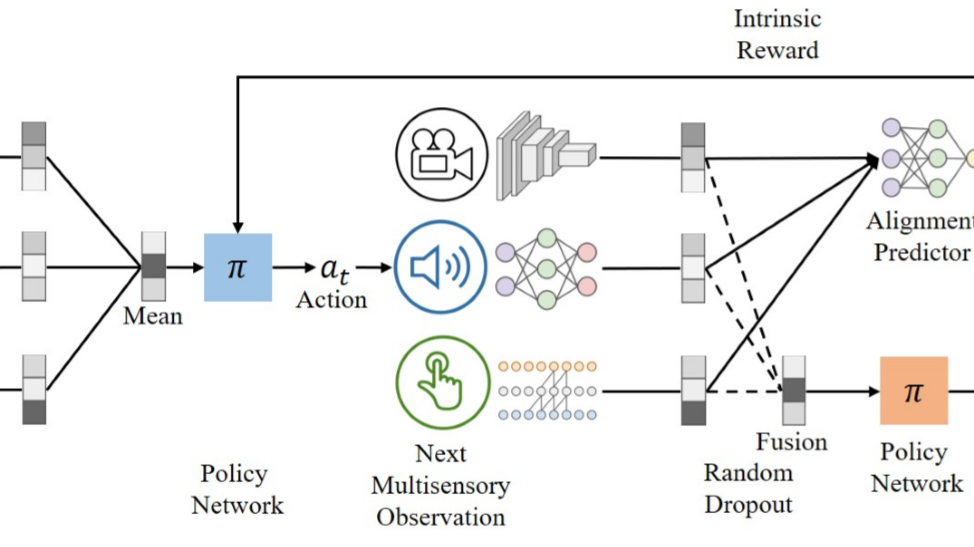
Recommended citation: Jianren Wang*, Ziwen Zhuang*, and Hang Zhao. Semi: Self-supervised exploration via multisensory incongruity. International Conference on Robotics and Automation, 2022. https://arxiv.org/abs/2009.12494
Published in CoRL, 2021
Imitation Learning, Adversarial Learning
Recommended citation: Jianren Wang*, Ziwen Zhuang*, Yuyang Wang, and Hang Zhao. Adversarially robust imitation learning. In 5th Annual Conference on Robot Learning, 2021. https://openreview.net/forum?id=9aVCUv3nKBg