Portfolio item number 1
Short description of portfolio item number 1
Short description of portfolio item number 1
Short description of portfolio item number 2
Published:
RoboMaster Competition hold by DJI
Published in CoRL, 2021
Imitation Learning, Adversarial Learning
Recommended citation: Jianren Wang*, Ziwen Zhuang*, Yuyang Wang, and Hang Zhao. Adversarially robust imitation learning. In 5th Annual Conference on Robot Learning, 2021. https://openreview.net/forum?id=9aVCUv3nKBg
Published in ICRA, 2022
A self-supervised exploration algorithm that uses multimodal sensory input as a reward signal. 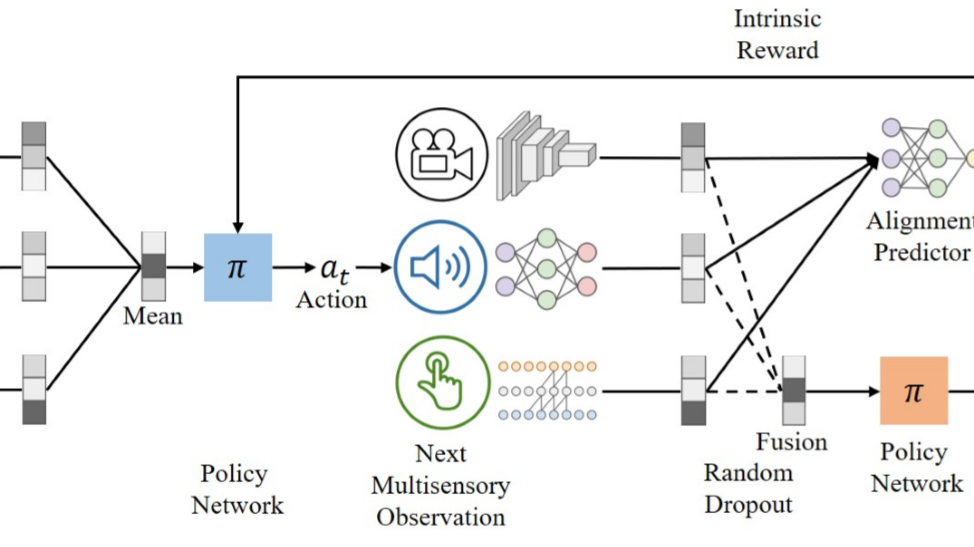
Recommended citation: Jianren Wang*, Ziwen Zhuang*, and Hang Zhao. Semi: Self-supervised exploration via multisensory incongruity. International Conference on Robotics and Automation, 2022. https://arxiv.org/abs/2009.12494
Published in CoRL (Oral) Best system paper finalist, 2023
An end-to-end neural network for Quadruped robot with extreme agility skills 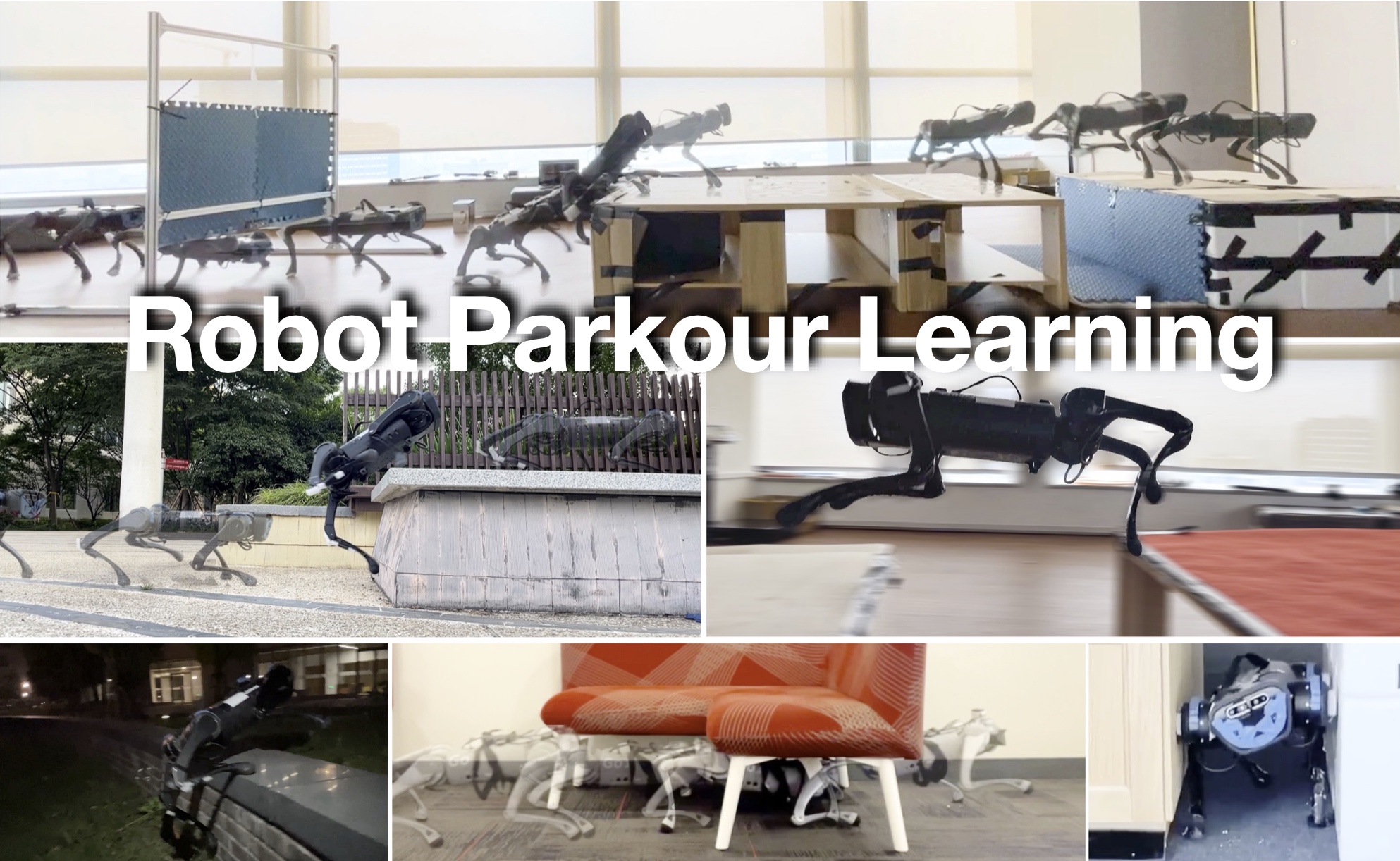
Recommended citation: Ziwen Zhuang*, Zipeng Fu*, Jianren Wang, Christopher G Atkeson, Soren Schwertfeger, Chelsea Finn, & Hang Zhao (2023). Robot Parkour Learning. In 7th Annual Conference on Robot Learning.
Published in Conference on Robot Learning, 2024
A single vision-based end-to-end whole-body-control parkour policy for humanoid robots. 
Recommended citation: Zhuang, Z., Yao, S., & Zhao, H. (2024). Humanoid Parkour Learning. 8th Annual Conference on Robot Learning.
Published in , 2025
We present a unified general humanoid motion interface and a zero-shot sim-to-real reinforcement learning framework, so that humanoid robots can successfully perform extreme contact-agnostic motion in the real world. 
Recommended citation: Ziwen Zhuang and Hang Zhao. "Embrace Collisions: Humanoid Shadowing for Deployable Contact-Agnostics Motions." (2025).
Published in arXiv, 2026
A single vision-based end-to-end whole-body-control parkour policy for humanoid robots. 
Recommended citation: Zhuang, Z., Zhu, S., Zhao, M., & Zhao, H. (2026). Deep Whole-body Parkour. arXiv preprint arXiv:2601.07701.
Published in arXiv, 2026
A scalable perceptive locomotion framework for humanoids. 
Recommended citation: Zhu S., Zhuang Z., Zhao M., & Zhao H. (2026). Hiking in the Wild. arXiv preprint arXiv:2601.07701.
Published:
Introduction of the state-of-the-art research in robot learning for undergraduate students.
Published:
Published:
Introduction of the latest athletic intelligence for legged robots in terms of robot parkour.
Published:
Introduction of the latest athletic intelligence for legged robots in terms of robot parkour.
Undergraduate course, ShanghaiTech University, School of Information Science and Technology, 2019
Managing a class of 90 students with another TA. Responsible for grading homework and exams, holding office hours, and answering questions on Piazza.
Workshop, ShanghaiTech University, School of Information Science and Technology, 2023
Introduction to robotics and basic mathematics for robotics.