Ziwen Zhuang (庄子文)
I am a 2nd-year PhD student at IIIS, Tsinghua Univesity, working on Athletic Intelligence, Embodied AI, and Robotics. I am currently working as a PhD Student at Tsinghua University, advised by Professor Hang Zhao. Before the enrollment at Tsinghua University, I was a research assistant at Shanghai Qi Zhi Institute. Before that, I was a member of the MARS Lab at ShanghaiTech University, advised by Professor Soeren Schwertfeger. I tightly collaborate with students at Stanford University and Carnegie Mellon University.
I am interested in the intersection of Robotics, Machine Learning, and Control. My research focuses on developing general robotics control algorithm that can perform highly dynamical tasks, such as parkour, acrobatics, and other athletic tasks. The ultimate goal is to develop a general controller to bridge the gap between large model and the hardware robot.
I have participated in several competitions: CMCM, MCM, RoboMaster. I was the project manager in the ShanghaiTech RoboMaster team.
News
2026-01: Project Instinct is released. Project Instinct is a full-stack framework for Instinct-Level intelligence on humanoid robots.
2024-11: Invited talk at Workshop on Whole-body Control and Bimanual Manipulation at CoRL 2024
2024-04: Invited talk at China Embodied AI Conference
2023-11: Invited talk at TechBeat
2023-08: Our paper “Robot Parkour Learning” is accepted by CoRL 2023. Project Page
Publications
Hiking in the Wild Permalink
Published in arXiv, 2026
A scalable perceptive locomotion framework for humanoids. 
Recommended citation: Zhu S., Zhuang Z., Zhao M., & Zhao H. (2026). Hiking in the Wild. arXiv preprint arXiv:2601.07701.
Deep Whole-body Parkour Permalink
Published in arXiv, 2026
A single vision-based end-to-end whole-body-control parkour policy for humanoid robots. 
Recommended citation: Zhuang, Z., Zhu, S., Zhao, M., & Zhao, H. (2026). Deep Whole-body Parkour. arXiv preprint arXiv:2601.07701.
Embrace Collisions: Humanoid Shadowing for Deployable Contact-Agnostics Motions Permalink
Published in , 2025
We present a unified general humanoid motion interface and a zero-shot sim-to-real reinforcement learning framework, so that humanoid robots can successfully perform extreme contact-agnostic motion in the real world. 
Recommended citation: Ziwen Zhuang and Hang Zhao. "Embrace Collisions: Humanoid Shadowing for Deployable Contact-Agnostics Motions." (2025).
Humanoid Parkour Learning Permalink
Published in Conference on Robot Learning, 2024
A single vision-based end-to-end whole-body-control parkour policy for humanoid robots. 
Recommended citation: Zhuang, Z., Yao, S., & Zhao, H. (2024). Humanoid Parkour Learning. 8th Annual Conference on Robot Learning.
Robot Parkour Learning Permalink
Published in CoRL (Oral) Best system paper finalist, 2023
An end-to-end neural network for Quadruped robot with extreme agility skills 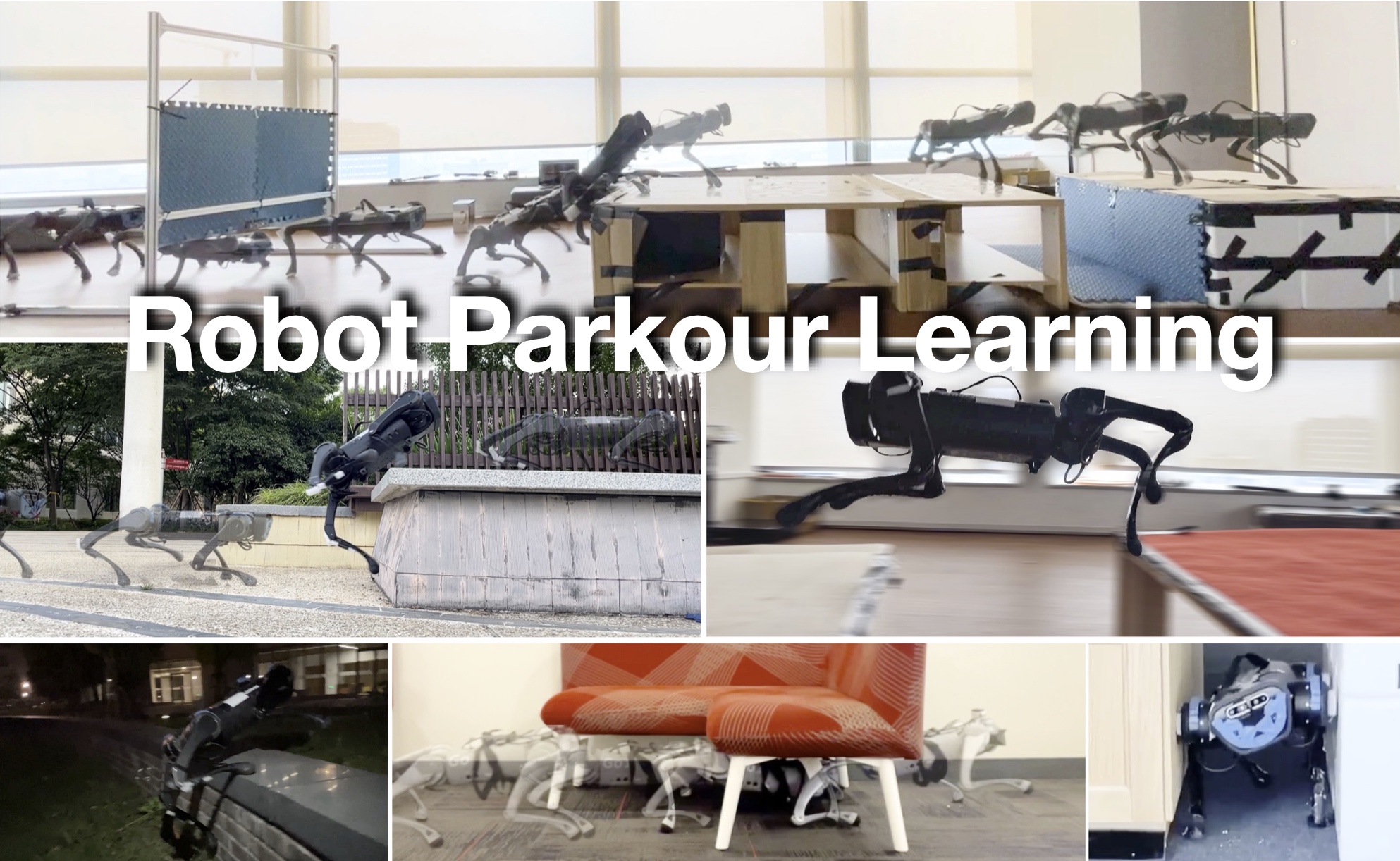
Recommended citation: Ziwen Zhuang*, Zipeng Fu*, Jianren Wang, Christopher G Atkeson, Soren Schwertfeger, Chelsea Finn, & Hang Zhao (2023). Robot Parkour Learning. In 7th Annual Conference on Robot Learning.
Semi: Self-supervised exploration via multisensory incongruity.
Published in ICRA, 2022
A self-supervised exploration algorithm that uses multimodal sensory input as a reward signal. 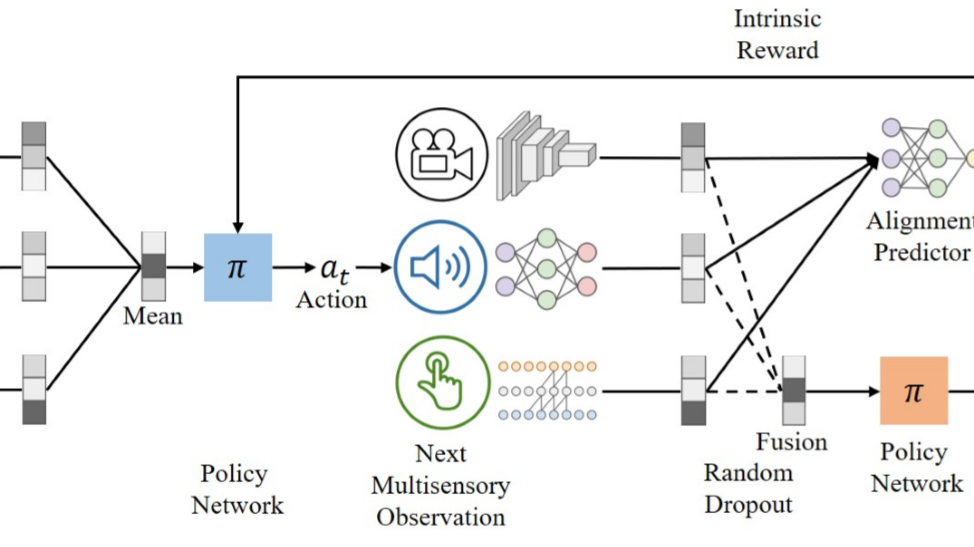
Recommended citation: Jianren Wang*, Ziwen Zhuang*, and Hang Zhao. Semi: Self-supervised exploration via multisensory incongruity. International Conference on Robotics and Automation, 2022. https://arxiv.org/abs/2009.12494
Adversarially Robust Imitation Learning Permalink
Published in CoRL, 2021
Imitation Learning, Adversarial Learning
Recommended citation: Jianren Wang*, Ziwen Zhuang*, Yuyang Wang, and Hang Zhao. Adversarially robust imitation learning. In 5th Annual Conference on Robot Learning, 2021. https://openreview.net/forum?id=9aVCUv3nKBg